RancherOS 初步使用小结
介绍
RancherOS 是 Rancher 推出的一个轻量级的 Linux 内核操作系统,专为容器环境而设计。
按官网的说法,它具有如下特性:
| 官方说法 | 瞎翻译 |
|---|---|
| Minimalist OS | 极简系统 ——当前版本 (v1.5.4) 镜像也只有 146M,还内置了各类虚拟机工具和 N 个版本的 Docker 环境 |
| Comprehensive System Services | 综合系统服务——所有的系统服务都可以通过 Compose 文件声明和启动 |
| Improved Security | 更安全——没有额外的工具 / 代码,所有应用都跑在容器里,当然更安全 |
| Up-to-Date Version of Docker & Linux | 集成最新的 Docker&Linux 发行版——装完系统直接就有 Docker 用,还是最新的,美滋滋 |
| Automated OS Configuration | 自动化系统配置——使用 cloud-init 工具解析 cloud-config 文件,统一管理系统级的所有配置,比如网络,docker 源… |
| 24x7 Enterprise-level Support | 不解释… |
简单的来说,当我们开始使用容器化的方式来管理应用和服务的时候,我们自然而然的会发现,我们对操作系统其实没什么需求了 ——环境依赖和工具链由镜像提供,GUI 界面或者浏览器毫无作用,系统内置的各种工具也就是启动一个容器的事…
把这些七七八八的都去掉,最后剩下:一个 Linux 内核 + Docker 环境 + 精简但是统一的配置管理 = RancherOS
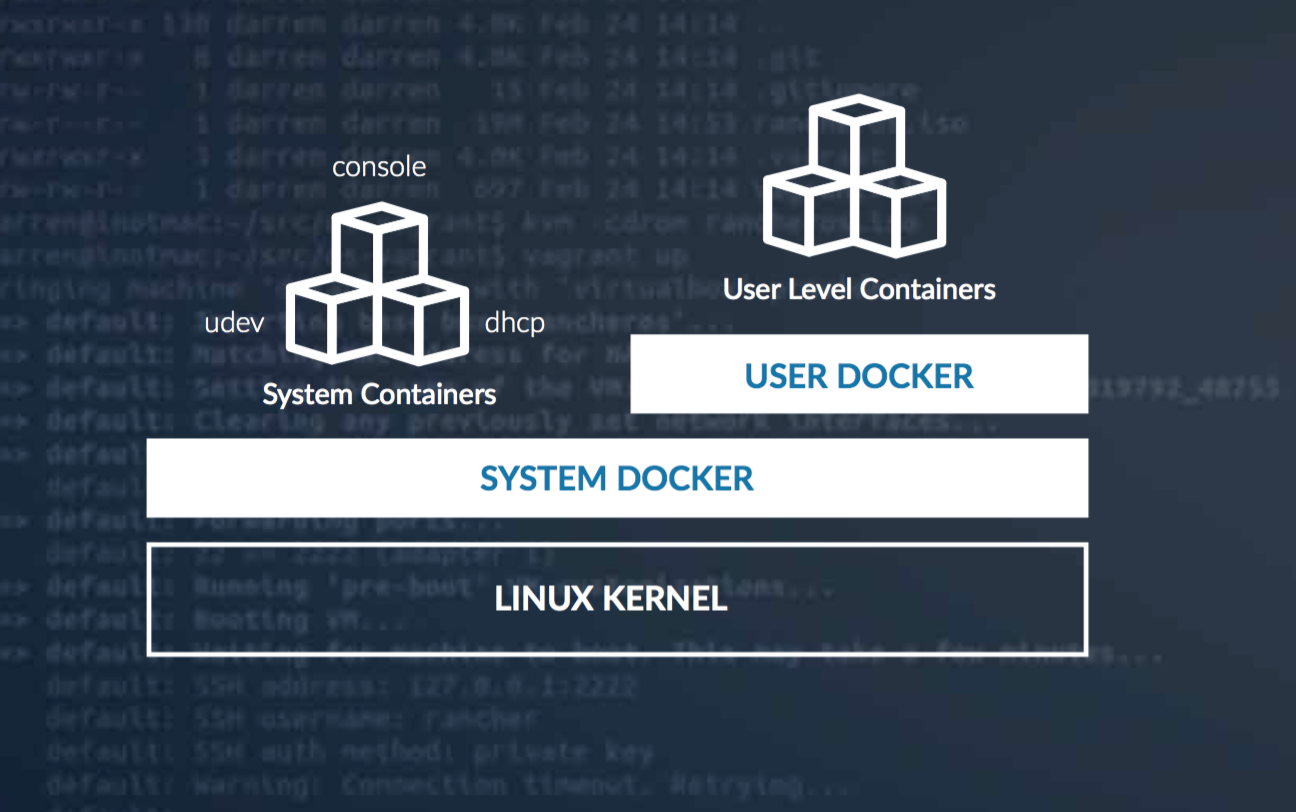
RancherOS 的架构也非常简单,除了内核,就是两个 Docker。
一个系统级的 Docker(system-docker) 接管了系统的绝大部分功能,比如在一般 Linux 上你会用 systemctl restart 重启服务,在这里就是用 system-docker restart 重启一个容器了。
用户级别的 Docker 也作为一个服务运行在 system-docker 之上,也就是我们一般意义上跑应用的 docker,正常使用。
安装
-
在 RancherOS Gitlab 页面 下载对应版本镜像。
-
新建虚拟机,加载 ISO 镜像,默认会以
rancher用户身份进入一个运行在内存之上的临时 RancherOS,所以建虚拟机的时候内存可以适当大一点,比如 2G -
新建 / 上传一个
cloud-config.yml文件,主要内容就是写入你的 ssh 公钥,因为 RancherOS 安装之后就只能通过 ssh + 公钥的方式登陆 (是的,你在虚拟机控制台都进不去),一个最简单的示例如下:# cloud-config ssh_authorized_keys: - ssh-rsa AAA... -
没有其他配置了的话,
sudo ros config valicate -i cloud-config.yml校验没有格式错误,sudo ros install -c cloud-config.yml -d /dev/sda将 RancherOS 安装到硬盘。一路只有 2 个选项,是否要安装?Y,是否要重启?N,因为重启比你卸载光驱还快… 直接就又进入一个新的临时 RancherOS 了…
-
手动
sudo poweroff,卸载光驱,重启,看到熟悉的牛头 LOGO,恭喜完成~
如果一定要为 rancher 设置一个密码的话,将安装命令替换为:
sudo ros install -c cloud-config.yml -d /dev/sda --append=rancher.password = 密码
我遇到的一个情况,在 Vmware 上安装时,临时 RancherOS 默认没有网, 需要手动配置网卡:
修改 /etc/network/interfaces 文件,在末尾添加:
auto eth0
iface eth0 inet static
# IP
address xxx.xxx.xxx.xxx
# 子网掩码
netmask xxx.xxx.xxx.xxx
# 广播地址 (可选)
broadcast xxx.xxx.xxx.xxx
# 所在网段 (可选)
network xxx.xxx.xxx.xxx
# 网关
gateway xxx.xxx.xxx.xxx
# dns 服务器
dns-nameservers xxx.xxx.xxx.xxx
配置好执行 sudo ifup eth0 即可连上网络。
使用
整个 RancherOS 自底向上分三个层面进行管理
| 层面 | 工具 | 管理 |
|---|---|---|
| 系统管理 | ros | cloud-config.yml |
| 服务管理 | system-docker | 类 Compose 文件 |
| 应用管理 | docker | 直接 run |
ros
ros 是对系统进行管理的工具,所以必须要以 root 权限执行,具体用法可以 help 看一下:
$ sudo ros help
NAME:
ros - Control and configure RancherOS
built: '2019-08-22T07:44:10Z'
USAGE:
ros [global options] command [command options] [arguments...]
VERSION:
v1.5.4
AUTHOR(S):
Rancher Labs, Inc.
COMMANDS:
config, c configure settings # 配置管理
console manage which console container is used # 切换命令行
engine manage which Docker engine is used # 切换 Docker 版本
service, s # 系统服务管理
os operating system upgrade/downgrade # 内核管理
tls setup tls configuration # tls 管理
install install RancherOS to disk # 安装系统
help, h Shows a list of commands or help for one command
GLOBAL OPTIONS:
--help, -h show help
--version, -v print the version
ros config
$ ros config
NAME:
ros config - configure settings
USAGE:
ros config command [arguments...]
COMMANDS:
get get value # 获取配置
set set a value # 设定配置
images List Docker images for a configuration from a file # 没用过
generate Generate a configuration file from a template # 没用过
export export configuration # 输出配置,比直接看 cloud-config.yml 全面
merge merge configuration from stdin # 合并配置文件
syslinux edit Syslinux boot global.cfg # 没用过
validate validate configuration from stdin # 校验配置文件格式
所有面向系统的设置都是通过 ros config 进行管理的,默认的配置存放在 /var/lib/rancher/conf/cloud-config.yml 中。未记录的配置修改都会在重启后失效 (是的,sudo passwd 也不能让你下次直接用户名密码登陆,不过有别的办法)
简单的修改配置可以直接执行 ros config set <key> <value>,比如
ros config set rancher.docker.tls true;
多个值写成列表,比如
ros config set rancher.network.dns.nameservers "['8.8.8.8','8.8.4.4']";
复杂一点的可以写一个小的 yml,然后执行 ros config merge -i <文件> 进行合并,
理论上也可以手动添加到 /var/lib/rancher/conf/cloud-config.yml 中。
但是个人不推荐这样做,因为现在版本的 cloud-config.yml 和 ros config export 输出的不是一回事,待研究。
ros service
$ ros service
NAME:
ros service -
USAGE:
ros service command [command options] [arguments...]
COMMANDS:
enable turn on an service # 启用服务
disable turn off an service # 禁止服务
list list services and state # 服务列表
delete delete a service # 删除服务
build Build or rebuild services # 构建 / 重构服务
create Create services # 创建服务
up Create and start containers # 创建并启动服务
start Start services # 启动服务
logs View output from containers # 查看服务日志
restart Restart services # 重启服务
stop Stop services # 停止服务
rm Delete services # 删除服务及镜像
pull Pulls service images # pull 服务镜像
kill Kill containers # 杀死服务容器
ps List containers # 列出服务容器
OPTIONS:
--tls Use TLS; implied by --tlsverify
--tlsverify Use TLS and verify the remote [$DOCKER_TLS_VERIFY]
--tlscacert value Trust certs signed only by this CA
--tlscert value Path to TLS certificate file
--tlskey value Path to TLS key file
--configdir value Path to docker config dir, default ${HOME}/.docker
--verbose, --debug
--help, -h show help
控制的是随系统启动的服务,用法包括声明文件的写法基本和 Docker Compose 一样,把它理解成 Docker Compose 的替代品就对了。
别的命令不解释了…
系统服务
$ ros s list
disabled amazon-ecs-agent
disabled container-cron
disabled open-iscsi
disabled zfs
disabled kernel-extras
disabled kernel-headers
disabled kernel-headers-system-docker
enabled open-vm-tools
disabled hyperv-vm-tools
disabled qemu-guest-agent
disabled rancher-server
disabled rancher-server-stable
disabled amazon-metadata
disabled volume-cifs
disabled volume-efs
disabled volume-nfs
disabled modem-manager
disabled waagent
disabled virtualbox-tools
disabled pingan-amc
上面说到系统级的服务都是用 ros s 控制启停,而想要自定义一个系统级的服务的话:
- 用 Docker Compose 语法编写服务的
xxx.yml文件,一般存放到/var/lib/rancher/conf/ ros service enable /var/lib/rancher/conf/xxx.yml启用该服务ros service up <serviceName>启动服务,如果一个 Compose 里定义了多个服务,那么需要ros service up <serviceName1> <serviceName2> <serviceName3> ...来同时启动
docker
没啥好说的…Just use it.
cloud-config
额外说一下这个 cloud-config。
现有的公有云 / 虚拟化厂商大多支持 cloud-init 工具进行系统配置初始化 (某种意义上的事实标准)。cloud-config 就是为 cloud-init 服务的。RancherOS 在 system-docker 中运行了一个 cloud-init 容器,它会在启动时查找可能位置上的 cloud-config 文件并依此配置系统配置项。
cloud-config 的语法格式就是标准的 YAML 语法,一个我在用的、比较完整的 cloud-config 的示例如下:
# 主机名
hostname: ros-test
# 系统配置
rancher:
# 替换控制台为 alpine,也可以是 ubuntu/centos/debian...
console: alpine
# 初始 Docker 源
bootstrap_docker:
registry_mirror: "http://dockerhub.azk8s.cn/"
# 系统 Docker 源
system_docker:
registry_mirror: "http://dockerhub.azk8s.cn/"
# 用户 Docker 源
docker:
registry_mirror: "http://dockerhub.azk8s.cn/"
# 网络
network:
interfaces:
eth0:
# IP 要是 CIDR 格式,要是和子网掩码对不上就上不了网
address: 192.168.0.1/24
# netmask: 255.255.255.0
# broadcast: 192.168.0.255
gateway: 192.168.0.254
mtu: 1500
dhcp: false
dns:
nameservers:
- 114.114.114.114
- 8.8.8.8
# # 扩容现有磁盘不要用 fdisk,除非你想把系统格式化了,用这个就能调整磁盘大小
# resize_device: /dev/sda
# 可登录的机器公钥
ssh_authorized_keys:
- ssh-rsa ...
- ssh-rsa ...
# # 挂载新磁盘
# mounts:
# - ["/dev/vdb", "/mnt/s", "ext4", ""]
# 写文件
write_files:
# 修改 apk 使用国内镜像
- path: /etc/apk/repositories
permissions: "0755"
owner: root
content: |
https://mirrors.ustc.edu.cn/alpine/latest-stable/main
https://mirrors.ustc.edu.cn/alpine/latest-stable/community
# 设置 CST 时区
- path: /etc/profile
permissions: "0755"
owner: root
content: |
export CHARSET=UTF-8
export PATH=/usr/local/sbin:/usr/local/bin:/usr/sbin:/usr/bin:/sbin:/bin
export PAGER=less
# 显示样式
export PS1="\[\e[37m\][\[\e[32m\]\u\[\e[37m\]@\h \[\e[36m\]\w\[\e[0m\]]\\$"
# 时区
export TZ='CST-8'
umask 022
for script in /etc/profile.d/*.sh ; do
if [-r $script] ; then
. $script
fi
done
# 确保 ssh 连接时会读取. bashrc
- path: /home/rancher/.bash_profile
permissions: "0755"
owner: rancher
content: |
# If the shell is interactive and .bashrc exists, get the aliases and functions
if [[$- == *i* && -f ~/.bashrc]]; then
. ~/.bashrc
fi
# 配置. bashrc
- path: /home/rancher/.bashrc
permissions: "0755"
owner: rancher
content: |
# .bashrc
# User specific aliases and functions
alias d="docker"
alias di="docker image"
alias dc="docker container"
alias dv="docker volumn"
alias dn="docker netwrok"
# Source global definitions
if [-f /etc/bashrc]; then
. /etc/bashrc
fi
# 启动时执行命令
runcmd:
# # 两种写法
# - [touch, /home/rancher/test1]
# - echo "test" > /home/rancher/test2
# 开机更新 apk 源
- apk update
# 启动定时任务服务
- crond